 |
Compatibility with NI Linux Real-Time |
|||||||||||||
|
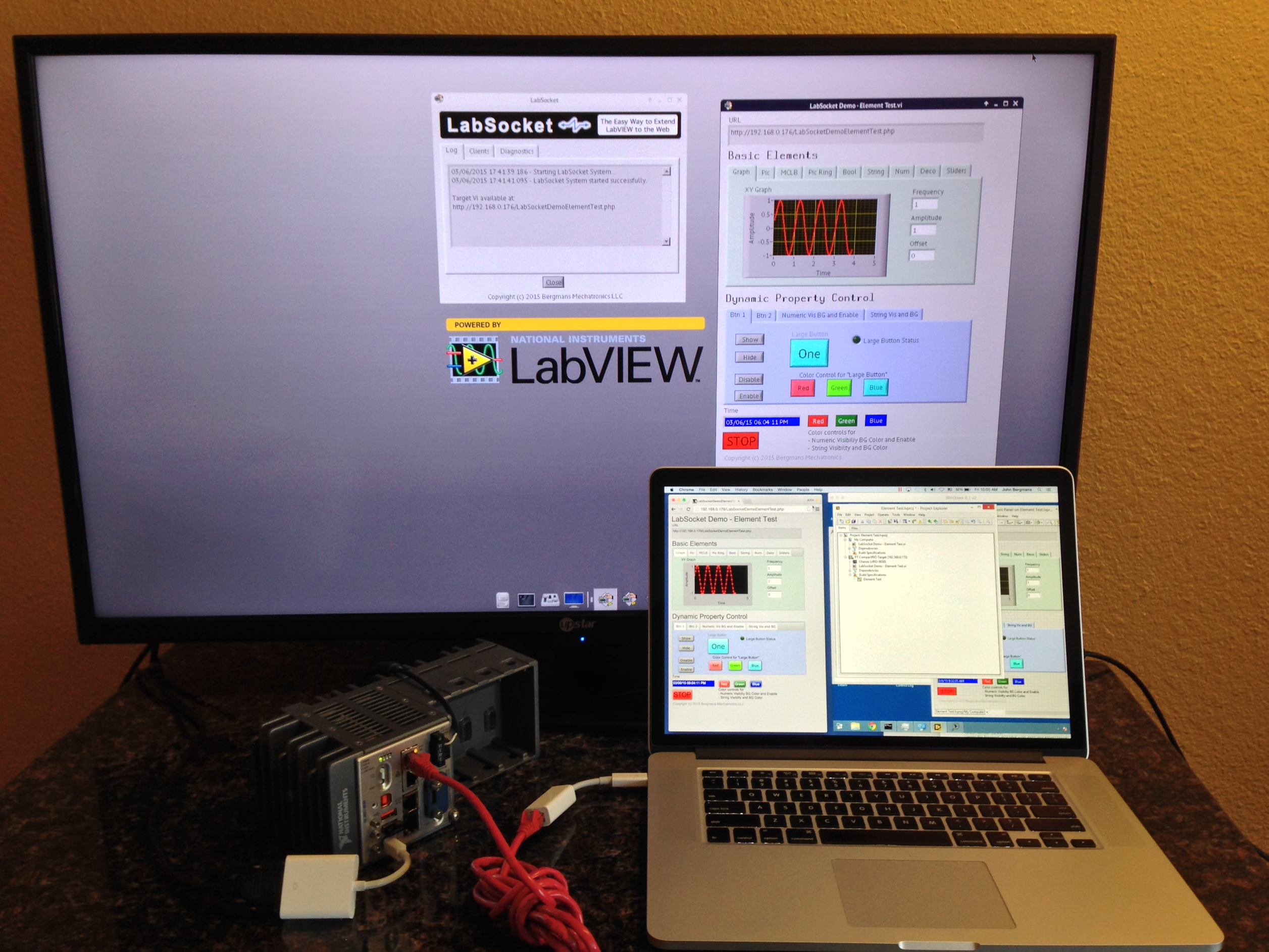
LabSocket enables LabVIEW applications to be monitored and controlled remotely using a web browser. The system operates without browser plug-ins, making it suitable for use with a wide range of desktop and mobile browsers. Previously, a separate version of the system known as LabSocket-RT enabled browser access to Real-Time targets, but it had support for only a subset of the front panel elements of desktop LabSocket. LabSocket-RT also required the use of a "LabSocket-RT Converter Tool" that would automatically modify the Target VI for use on an RT platform but added an undesirable level of complexity to the development process. The new unified LabSocket v3.4 combines the capabilities of the former LabSocket-Basic and LabSocket-MultiClient systems and adds support for operation on National Instruments cRIO-903x NI Linux Real-Time controllers. This is a significant advance because it greatly simplifies the use of the LabSocket system on these popular devices. This version also supports a wider variety of elements and properties than the earlier LabSocket-RT. The picture below shows the LabSocket system operating on a cRIO-9030 and a browser accessing the Target VI on the cRIO. |
|||||||||||||
|
|||||||||||||
| Developer Notes
LabSocket is still being modified and tested for use on Real-Time platforms and does not yet provide the full capabilities on RT platforms that are available on desktop platforms. The following notes provide details describe the details of the compatibility of LabSocket with RT platforms. Compatible RT Platforms Supported Elements
Tab elements, decorations and static pictures are also supported. Full support for elements such as XY Graphs is expected to be available in an upcoming release. Operation Modes Supported Client Mapping Modes On Linux Real-Time platforms, only Basic mapping is currently supported; however, support for MultiClient mapping is planned. The supported mappings are summarized in the following table. LabSocket Client Mapping Modes
Instructions |
|||||||||||||
Contact |
|||||||||||||
![]() Top
Top
|
©
2011-2024 Bergmans Mechatronics, LLC |